

Article Sidebar
Downloads
Main Article Content
Abstract
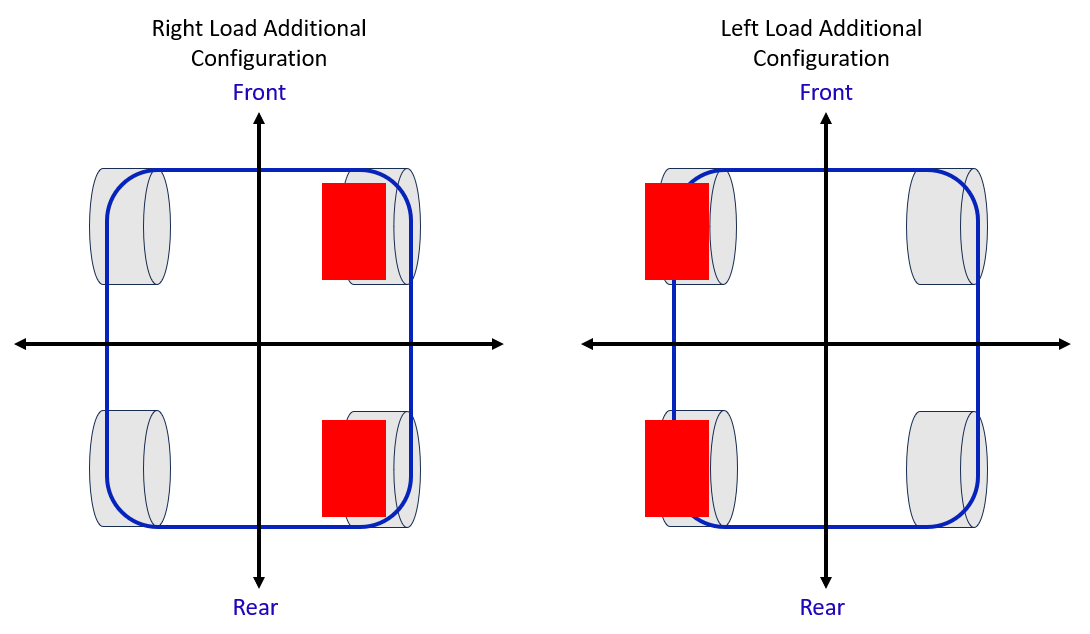
Collision avoidance (CA) systems have become a requirement in vehicles due to their ability to prevent collisions. Despite the implementation of these systems on the road, accidents still happen due to the lack of adaptability of CA systems corresponding to road environment nonlinearities and external disturbances. Hence, this research focuses on the effect of external disturbances, such as additional load distribution on the vehicle while avoiding obstacles. The deployment of the CA scenario, considering the presence of disturbance, was simulated in MATLAB Simulink, with the reference trajectory for the system obtained from a skilled driver in real-time experiments at different speeds. The objective of this study is to observe and analyse the effect of additional load disturbances on vehicle stability, especially when the driver countersteers to avoid an obstacle. An increase in the additional load percentage at each side of the vehicle produces excessive lateral force opposite to the direction of the vehicle. This scenario creates a significant load transfer phenomenon and directly causes the vehicle to oversteer and understeer while avoiding obstacles. It has been observed that human cognition plays a huge role in defining a reference trajectory at different speeds while avoiding an obstacle. The pattern of the reference trajectory also affects the magnitude of the load transfer phenomena, especially when the driver manoeuvres the vehicle aggressively.
Keywords
Article Details

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
References
- N. Che-Him et al., “Factors Affecting Road Traffic Accident in Batu Pahat, Johor, Malaysia,” Journal of Physics: Conference Series, vol. 995, p. 012033, Apr. 2018, doi: 10.1088/1742-6596/995/1/012033.
- E. Yong et al., “Investigation of the Vehicle Driving Trajectory During Turning at Intersectional Roads Using Deep Learning Model,” Automotive Experiences, vol. 7, no. 1, pp. 63–76, Apr. 2024, doi: 10.31603/ae.10649.
- N. Md Yusof et al., “Effect of Road Darkness on Young Driver Behaviour when Approaching Parked or Slow-moving Vehicles in Malaysia,” Automotive Experiences, vol. 6, no. 2, pp. 216–233, May 2023, doi: 10.31603/ae.8206.
- F. H. K. Kamaru Zaman et al., “Malaysian Public’s Perception Toward Event Data Recorder (EDR) in Vehicles,” Automotive Experiences, vol. 7, no. 3, pp. 513–524, Dec. 2024, doi: 10.31603/ae.11706.
- S. I. Mohammed, “An Overview of Traffic Accident Investigation Using Different Techniques,” Automotive Experiences, vol. 6, no. 1, pp. 68–79, Jan. 2023, doi: 10.31603/ae.7913.
- M. Mutharuddin et al., “The Road Safety: Utilising Machine Learning Approach for Predicting Fatality in Toll Road Accidents,” Automotive Experiences, vol. 7, no. 2, pp. 236–251, 2024, doi: 10.31603/ae.11082.
- M. C. Jia Ying, W. Kean Yew, P. J. Yew, and A. Yang Her, “Real-time road accident reporting system with location detection using cloud-based data analytics,” in IECON 2022 – 48th Annual Conference of the IEEE Industrial Electronics Society, IEEE, Oct. 2022, pp. 1–6. doi: 10.1109/IECON49645.2022.9968507.
- N. Ikhsan, A. S. Abdullah, and R. Ramli, “The effect of gross vehicle weight on the stability of heavy vehicle during cornering,” International Journal of Mechanical and Mechatronics Engineering, vol. 9, no. 7, pp. 1251–1256, 2015.
- M. G. Masuri, A. Dahlan, A. Danis, and K. A. M. Isa, “Public Participation in Shaping Better Road Users in Malaysia,” Procedia - Social and Behavioral Sciences, vol. 168, pp. 341–348, Jan. 2015, doi: 10.1016/j.sbspro.2014.10.239.
- N. Lin, C. Zong, M. Tomizuka, P. Song, Z. Zhang, and G. Li, “An Overview on Study of Identification of Driver Behavior Characteristics for Automotive Control,” Mathematical Problems in Engineering, vol. 2014, no. 1, pp. 1–15, Jan. 2014, doi: 10.1155/2014/569109.
- S. S. Lodhi, N. Kumar, and P. K. Pandey, “Autonomous vehicular overtaking maneuver: A survey and taxonomy,” Vehicular Communications, vol. 42, p. 100623, Aug. 2023, doi: 10.1016/j.vehcom.2023.100623.
- U. Z. Abdul Hamid, K. Pushkin, H. Hamzuri, D. Gueraiche, and M. A. Abdul Rahman, “Current Collision Mitigation Technologies for Advanced Driver Assistance Systems – A Survey,” PERINTIS eJournal, vol. 6, no. 2, pp. 78–90, 2016.
- C. Wang, J. Delport, and Y. Wang, “Lateral Motion Prediction of On-Road Preceding Vehicles: A Data-Driven Approach,” Sensors, vol. 19, no. 9, p. 2111, May 2019, doi: 10.3390/s19092111.
- J. A. Michon, “A critical view of driver behavior models: what do we know, what should we do?,” in Human Behavior and Traffic Safety, New York: Springer, 1985, pp. 485–524.
- K. Rumar, “The role of perceptual and cognitive filters in observed behavior,” in Human Behavior and Traffic Safety, H. behavior and traffic safety, Ed., North-Holland, 1985, pp. 151–170.
- M. Hosseinpour, A. S. Yahaya, A. F. Sadullah, N. Ismail, and S. M. R. Ghadiri, “Evaluating the effects of road geometry, environment, and traffic volume on rollover crashes,” Transport, vol. 31, no. 2, pp. 221–232, Jun. 2016, doi: 10.3846/16484142.2016.1193046.
- U. Z. Abdul Hamid, H. Hamzuri, M. A. A. Rahman, and W. J. Yahya, “A safe-distance based threat assessment with geometrical based steering control for vehicle collision avoidance,” Journal of Telecommunication, Electronic and Computer Engineering (JTEC), vol. 8, no. 2, pp. 53–58, 2016.
- U. Z. A. Hamid, Y. Saito, H. Zamzuri, M. A. A. Rahman, and P. Raksincharoensak, “A review on threat assessment, path planning and path tracking strategies for collision avoidance systems of autonomous vehicles,” International Journal of Vehicle Autonomous Systems, vol. 14, no. 2, p. 134, 2018, doi: 10.1504/IJVAS.2018.096154.
- U. Z. Abdul Hamid, H. Zamzuri, T. Yamada, M. A. Abdul Rahman, Y. Saito, and P. Raksincharoensak, “Modular design of artificial potential field and nonlinear model predictive control for a vehicle collision avoidance system with move blocking strategy,” Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, vol. 232, no. 10, pp. 1353–1373, Sep. 2018, doi: 10.1177/0954407017729057.
- K. Zheng, B. Zhou, X. Wu, T. Chai, and Q. Pan, “A humanoid collision-avoidance strategy considering a large sideslip angle state,” Control Engineering Practice, vol. 138, p. 105623, Sep. 2023, doi: 10.1016/j.conengprac.2023.105623.
- A. Zulkifli, M. H. Peeie, M. A. Zakaria, M. I. Ishak, M.A. Shahrom, and B. Kujunni, “Motion Planning and Tracking Trajectory of an Autonomous Emergency Braking Pedestrian (AEB-P) System Based on Different Brake Pad Friction Coefficients on Dry Road Surface,” International Journal of Automotive and Mechanical Engineering, vol. 19, no. 3, Oct. 2022, doi: 10.15282/ijame.19.3.2022.12.0772.
- Y. Saito and P. Raksincharoensak, “Shared Control in Risk Predictive Braking Maneuver for Preventing Collisions With Pedestrians,” IEEE Transactions on Intelligent Vehicles, vol. 1, no. 4, pp. 314–324, Dec. 2016, doi: 10.1109/TIV.2017.2700210.
- U. Z. Abdul Hamid, Y. Saito, and P. Raksina Charoensak, “Collision avoidance performance analysis of a varied loads autonomous vehicle using integrated nonlinear controller,” PERINTIS eJournal, vol. 8, no. 1, pp. 25–43, 2018.
- B. Kunjunni, M. A. bin Zakaria, A. P. . Majeed, A. F. A. Nasir, M. H. Bin Peeie, and U. Z. Abdul Hamid, “Effect of load distribution on longitudinal and lateral forces acting on each wheel of a compact electric vehicle,” SN Applied Sciences, vol. 2, no. 2, p. 244, Feb. 2020, doi: 10.1007/s42452-020-1996-9.
- J. Wang, Z. Luo, Y. Wang, B. Yang, and F. Assadian, “Coordination Control of Differential Drive Assist Steering and Vehicle Stability Control for Four-Wheel-Independent-Drive EV,” IEEE Transactions on Vehicular Technology, vol. 67, no. 12, pp. 11453–11467, Dec. 2018, doi: 10.1109/TVT.2018.2872857.
- J. Samsundar and J. C. Huston, “Estimating Lateral Stability Region of a Nonlinear 2 Degree-of-Freedom Vehicle,” SAE Transactions, vol. 107, pp. 1791–1797, Apr. 1998.
- Z. Sun, J. Zou, D. He, Z. Man, and J. Zheng, “Collision-avoidance steering control for autonomous vehicles using neural network-based adaptive integral terminal sliding mode,” Journal of Intelligent & Fuzzy Systems, vol. 39, no. 3, pp. 4689–4702, Oct. 2020, doi: 10.3233/JIFS-200625.
- X. Wu, B. Zhou, G. Wen, L. Long, and Q. Cui, “Intervention criterion and control research for active front steering with consideration of road adhesion,” Vehicle System Dynamics, vol. 56, no. 4, pp. 553–578, Apr. 2018, doi: 10.1080/00423114.2017.1395465.
- R. Rajamani, Vehicle Dynamics and Control, 2nd ed., vol. 2nd Edition. in Mechanical Engineering Series, vol. 2nd Edition. Boston, MA: Springer US, 2012. doi: 10.1007/978-1-4614-1433-9.
- I. M. Zulhilmi, P. M. Heerwan, S. M. Asyraf, I. M. Sollehudin, and I. M. Ishak, “Experimental study on the effect of emergency braking without anti-lock braking system to vehicle dynamics behaviour,” International Journal of Automotive and Mechanical Engineering, vol. 17, no. 2, pp. 7832–7841, Apr. 2020, doi: https://doi.org/10.15282/ijame.17.2.2020.02.0583.